Fine-tuning SimCLR for Firefighting Device Classification
Self-supervised learning meets multi-object classification with SimCLR on COCO-annotated data
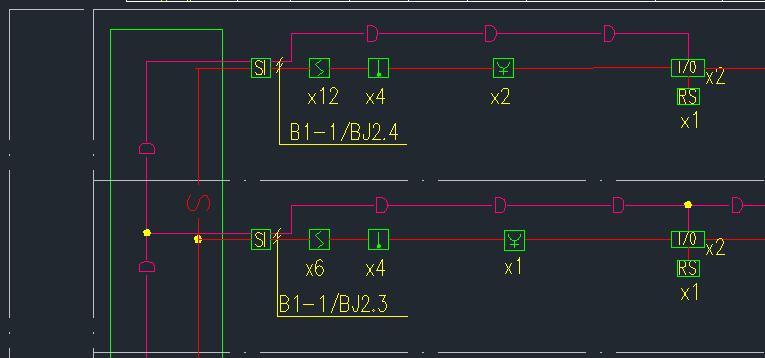
Table of Contents
Overview
This project demonstrates how a self-supervised representation learning model (SimCLR) can be fine-tuned for a practical, real-world multi-class object classification task. Given scene images annotated with bounding boxes in COCO format, each annotated object is cropped out and independently classified into one of 42 firefighting device categories.
The pipeline is end-to-end:
- Load a pre-trained SimCLR checkpoint (ResNet-50 backbone, trained via contrastive learning).
- Attach a lightweight linear classification head on top of the frozen/unfrozen encoder.
- Fine-tune the entire model on cropped object regions using standard cross-entropy loss.
- Evaluate with Top-1 / Top-5 accuracy, confusion matrix, and per-class precision/recall.
- Visualize inference: each cropped object is displayed side-by-side with its ground-truth and predicted label.
What is SimCLR?
SimCLR (Simple Framework for Contrastive Learning of Visual Representations) is a self-supervised learning framework developed by Google Research. The core idea is to learn powerful visual representations without labels by training the model to recognize that two augmented views of the same image are more similar to each other than to views from different images.
Key components:
- Data Augmentation: Random cropping, color jittering, and Gaussian blur produce two correlated views of each image.
- Base Encoder: A deep CNN (typically ResNet) extracts representation vectors from augmented views.
- Projection Head: A small MLP maps representations to a space where the contrastive loss is applied.
- NT-Xent Loss (Normalized Temperature-scaled Cross-Entropy): Maximizes agreement between positive pairs while pushing apart negative pairs in a mini-batch.
The result is an encoder that produces rich, transferable feature representations — even though it has never seen a single label during pre-training. These representations can then be fine-tuned for downstream tasks with relatively small labeled datasets.
Paper: A Simple Framework for Contrastive Learning of Visual Representations (Chen et al., 2020)
Original Repository: google-research/simclr
PyTorch Implementation Used: sthalles/SimCLR
Dataset
This project uses the Firefighting Device Detection dataset sourced from Roboflow Universe, annotated in COCO format.
| Split | Images | Object Annotations |
|---|---|---|
| Train | 102 | 2,606 |
| Valid | 28 | 755 |
| Test | 18 | 424 |
| Total | 148 | 3,785 |
Each image contains multiple firefighting devices. The dataset covers 42 object categories, including:
24V-power-cord,acousto-optic-alarm,bus-isolation-module,coded-smoke-detector,fire-hydrant-button,i-o-module,manual-alarm-button-with-fire-telephone-jack,smoke-vent,water-flow-indicator, and many more.
Each annotation provides a bounding box ([x, y, width, height]) and a category_id, which is used to crop individual objects and map them to class labels.
Approach
Data Pipeline: From Bounding Boxes to Classification Samples
Since SimCLR is an image-level representation learner (not a detector), we convert the detection dataset into a classification dataset by cropping each annotated object from its source image:
class CocoObjectCropClassification(Dataset):
def __getitem__(self, idx):
s = self.samples[idx]
image = Image.open(os.path.join(self.images_dir, s["file_name"])).convert("RGB")
x, y, w, h = s["bbox"]
crop = image.crop((int(x), int(y), int(x + w), int(y + h)))
if self.transform:
crop = self.transform(crop)
return crop, s["label"]Each COCO annotation becomes one (crop, label) sample. Bounding boxes are clamped to image boundaries for robustness. A consistent category_id -> class_index mapping is built from the training split only and reused across validation, test, and inference to prevent label mismatch.
Transforms applied:
| Stage | Transforms |
|---|---|
| Train | Resize(224) → RandomHorizontalFlip → ToTensor |
| Val / Test | Resize(224) → ToTensor |
Model Architecture
The classification model is a two-part architecture:
- SimCLR Backbone (ResNet-50): Pre-trained via contrastive learning, this produces a 2,048-dimensional feature vector
hfor each input crop. - Linear Classifier: A single
nn.Linear(2048, 42)layer maps the features to class logits.
class SimCLRFinetuneClassifier(nn.Module):
def __init__(self, simclr_model, num_classes):
super().__init__()
self.simclr = simclr_model
self.classifier = nn.Linear(self.simclr.n_features, num_classes)
def forward(self, x):
h, _, _, _ = self.simclr(x, x) # extract representation
return self.classifier(h) # classify
The SimCLR pre-trained checkpoint (checkpoint_100.tar) is loaded into the encoder before attaching the classification head. During fine-tuning, all parameters (encoder + classifier) are updated end-to-end, allowing the learned representations to adapt to the specific domain of firefighting devices.
Fine-tuning Procedure
| Hyperparameter | Value |
|---|---|
| Pre-trained Backbone | SimCLR ResNet-50 (100 epochs contrastive pre-training) |
| Projection Dimension | 64 |
| Optimizer | Adam |
| Learning Rate | 1e-4 |
| Loss Function | Cross-Entropy |
| Batch Size | 32 |
| Epochs | 20 |
| Input Resolution | 224 x 224 |
The fine-tuning loop is straightforward supervised training:
for epoch in range(20):
# Training pass
for x, y in train_loader:
logits = model(x.to(device))
loss = criterion(logits, y.to(device))
loss.backward()
optimizer.step()
# Validation pass (no gradient)
with torch.no_grad():
for x, y in val_loader:
logits = model(x.to(device))
val_loss = criterion(logits, y.to(device))
Training converged rapidly, reaching 100% training accuracy by epoch 11 and maintaining ~99.7% validation accuracy from epoch 5 onward. The final model checkpoint is saved with:
- Model weights (
state_dict) - Optimizer state
- Category mapping (
catid_to_idx) - Number of classes
This self-contained checkpoint ensures reproducible inference without needing the original training annotations.
Results
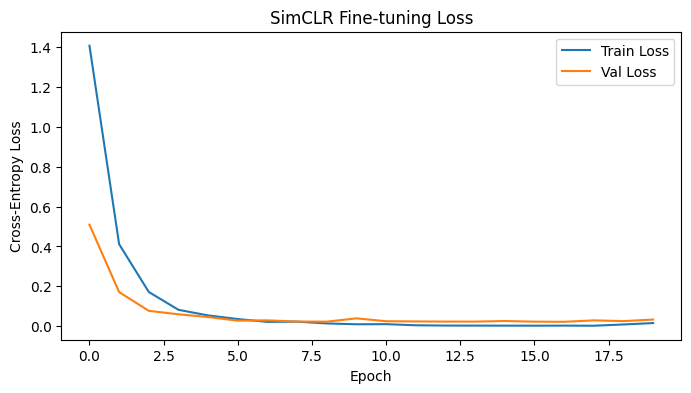
Training Curves
The model converges quickly, demonstrating that SimCLR’s pre-trained representations provide a strong initialization for this domain-specific task. The gap between train and validation loss remains small, indicating minimal overfitting despite the relatively small dataset size.
| Epoch | Train Loss | Train Acc | Val Loss | Val Acc |
|---|---|---|---|---|
| 0 | 1.4073 | 67.84% | 0.5091 | 86.09% |
| 5 | 0.0354 | 99.39% | 0.0272 | 99.60% |
| 11 | 0.0040 | 100.00% | 0.0234 | 99.74% |
| 19 | 0.0152 | 99.46% | 0.0328 | 99.47% |
Test Set Performance
On the held-out test set (18 images, 424 object crops):
| Metric | Score |
|---|---|
| Top-1 Accuracy | 98.35% |
| Top-5 Accuracy | 99.29% |
| Weighted Precision | 98.95% |
| Weighted Recall | 98.35% |
| Weighted F1-Score | 98.50% |
The model achieves near-perfect classification on most of the 42 categories, with only a handful of misclassifications on rare classes with very few test samples.
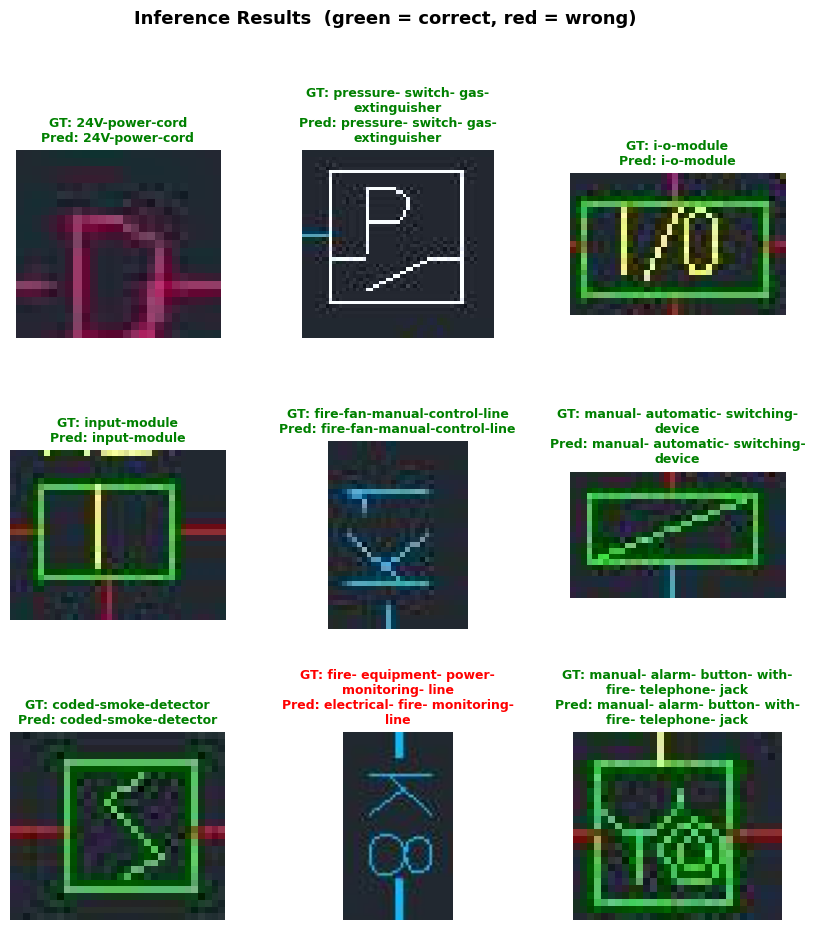
Visual Inference Results
Below are sample inference results showing each cropped object from test images alongside its ground-truth label (GT) and predicted label (Pred). Correct predictions are shown in green; incorrect ones in red.
How to Run
Github Repo: https://github.com/GioJung97/Fine-tune-SimCLR-with-COCO
Prerequisites
pip install torch torchvision simclr scikit-learn matplotlib pillow
Fine-tuning
Open and run finetuning.ipynb end-to-end. This will:
- Load the COCO-annotated dataset from
./coco/ - Load the pre-trained SimCLR checkpoint from
./checkpoint/checkpoint_100.tar - Train the classifier for 20 epochs
- Save the fine-tuned model to
./finetuned_model/
Inference & Evaluation
Open and run inferencing.ipynb end-to-end. This will:
- Load the fine-tuned checkpoint
- Run evaluation on the test set (Top-1, Top-5, classification report)
- Display a visual grid of cropped objects with GT vs. predicted labels
References
- SimCLR Paper: Chen, T., Kornblith, S., Norouzi, M., & Hinton, G. (2020). A Simple Framework for Contrastive Learning of Visual Representations. ICML 2020. [arXiv:2002.05709]
- SimCLR Original Repo (TensorFlow): google-research/simclr
- PyTorch SimCLR Implementation: sthalles/SimCLR
- Dataset: Firefighting Device Detection on Roboflow Universe (License: BY-NC-SA 4.0)